注意
完全なサンプルコードをダウンロードするには、最後に移動してください。または、Binderを介してブラウザでこのサンプルを実行します。
シンプルな画像スティッチングで画像を組み立てる#
この例では、剛体運動の仮説の下で画像のセットを組み立てる方法を示します。
from matplotlib import pyplot as plt
import numpy as np
from skimage import data, util, transform, feature, measure, filters, metrics
def match_locations(img0, img1, coords0, coords1, radius=5, sigma=3):
"""Match image locations using SSD minimization.
Areas from `img0` are matched with areas from `img1`. These areas
are defined as patches located around pixels with Gaussian
weights.
Parameters
----------
img0, img1 : 2D array
Input images.
coords0 : (2, m) array_like
Centers of the reference patches in `img0`.
coords1 : (2, n) array_like
Centers of the candidate patches in `img1`.
radius : int
Radius of the considered patches.
sigma : float
Standard deviation of the Gaussian kernel centered over the patches.
Returns
-------
match_coords: (2, m) array
The points in `coords1` that are the closest corresponding matches to
those in `coords0` as determined by the (Gaussian weighted) sum of
squared differences between patches surrounding each point.
"""
y, x = np.mgrid[-radius : radius + 1, -radius : radius + 1]
weights = np.exp(-0.5 * (x**2 + y**2) / sigma**2)
weights /= 2 * np.pi * sigma * sigma
match_list = []
for r0, c0 in coords0:
roi0 = img0[r0 - radius : r0 + radius + 1, c0 - radius : c0 + radius + 1]
roi1_list = [
img1[r1 - radius : r1 + radius + 1, c1 - radius : c1 + radius + 1]
for r1, c1 in coords1
]
# sum of squared differences
ssd_list = [np.sum(weights * (roi0 - roi1) ** 2) for roi1 in roi1_list]
match_list.append(coords1[np.argmin(ssd_list)])
return np.array(match_list)
データ生成#
この例では、わずかに傾斜したノイズの多い画像のリストを生成します。
img = data.moon()
angle_list = [0, 5, 6, -2, 3, -4]
center_list = [(0, 0), (10, 10), (5, 12), (11, 21), (21, 17), (43, 15)]
img_list = [
transform.rotate(img, angle=a, center=c)[40:240, 50:350]
for a, c in zip(angle_list, center_list)
]
ref_img = img_list[0].copy()
img_list = [
util.random_noise(filters.gaussian(im, sigma=1.1), var=5e-4, rng=seed)
for seed, im in enumerate(img_list)
]
psnr_ref = metrics.peak_signal_noise_ratio(ref_img, img_list[0])
画像レジストレーション#
注意
このステップは、RANSACを使用したロバストなマッチングで説明されているアプローチを使用して実行されますが、問題に応じて画像レジストレーションセクションの他の方法も適用できます。
参照点がリスト内のすべての画像で検出されます。
min_dist = 5
corner_list = [
feature.corner_peaks(
feature.corner_harris(img), threshold_rel=0.001, min_distance=min_dist
)
for img in img_list
]
最初の画像で検出されたハリスコーナーが参照として選択されます。次に、他の画像で検出された点が参照点にマッチングされます。
img0 = img_list[0]
coords0 = corner_list[0]
matching_corners = [
match_locations(img0, img1, coords0, coords1, min_dist)
for img1, coords1 in zip(img_list, corner_list)
]
すべての点が参照点に登録されると、RANSAC法を使用してロバストな相対アフィン変換を推定できます。
src = np.array(coords0)
trfm_list = [
measure.ransac(
(dst, src),
transform.EuclideanTransform,
min_samples=3,
residual_threshold=2,
max_trials=100,
)[0].params
for dst in matching_corners
]
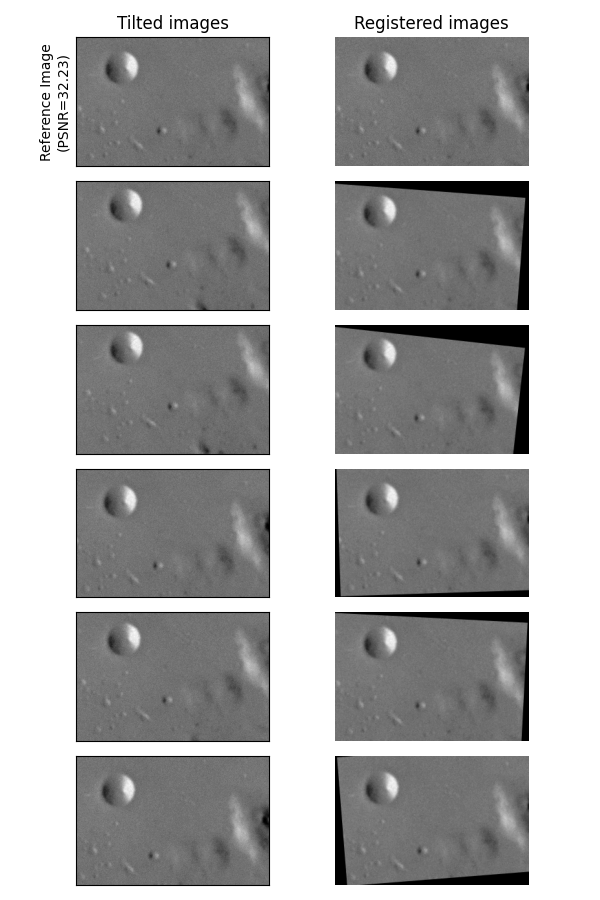
fig, ax_list = plt.subplots(6, 2, figsize=(6, 9), sharex=True, sharey=True)
for idx, (im, trfm, (ax0, ax1)) in enumerate(zip(img_list, trfm_list, ax_list)):
ax0.imshow(im, cmap="gray", vmin=0, vmax=1)
ax1.imshow(transform.warp(im, trfm), cmap="gray", vmin=0, vmax=1)
if idx == 0:
ax0.set_title("Tilted images")
ax0.set_ylabel(f"Reference Image\n(PSNR={psnr_ref:.2f})")
ax1.set_title("Registered images")
ax0.set(xticklabels=[], yticklabels=[], xticks=[], yticks=[])
ax1.set_axis_off()
fig.tight_layout()
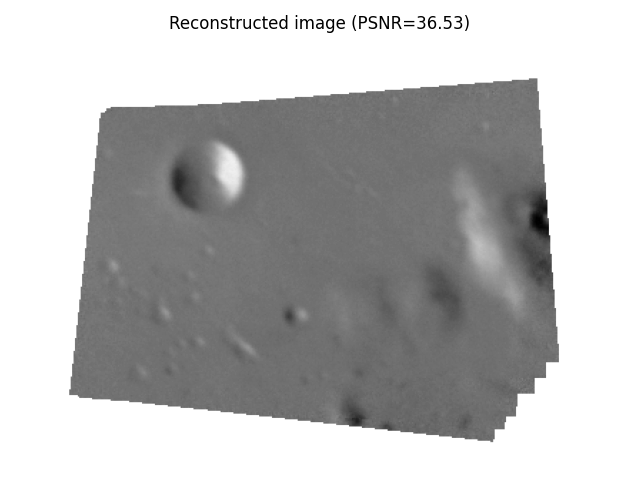
画像組み立て#
合成画像は、登録された画像の参照画像に対する相対的な位置を使用して取得できます。これを行うために、参照画像の周りにグローバルドメインを定義し、このドメインに他の画像を配置します。
簡単な平行移動によってグローバルドメイン画像で参照画像を移動するために、グローバル変換が定義されます
最後に、グローバル変換と相対変換を合成することにより、グローバルドメインにおける他の画像の相対位置が取得されます
global_img_list = [
transform.warp(
img, trfm.dot(glob_trfm), output_shape=out_shape, mode="constant", cval=np.nan
)
for img, trfm in zip(img_list, trfm_list)
]
all_nan_mask = np.all([np.isnan(img) for img in global_img_list], axis=0)
global_img_list[0][all_nan_mask] = 1.0
composite_img = np.nanmean(global_img_list, 0)
psnr_composite = metrics.peak_signal_noise_ratio(
ref_img, composite_img[margin : margin + height, margin : margin + width]
)
fig, ax = plt.subplots(1, 1)
ax.imshow(composite_img, cmap="gray", vmin=0, vmax=1)
ax.set_axis_off()
ax.set_title(f"Reconstructed image (PSNR={psnr_composite:.2f})")
fig.tight_layout()
plt.show()
スクリプトの総実行時間: (0分1.527秒)