注記
最後まで移動して、完全なサンプルコードをダウンロードしてください。または、Binderを使用してブラウザでこの例を実行してください。
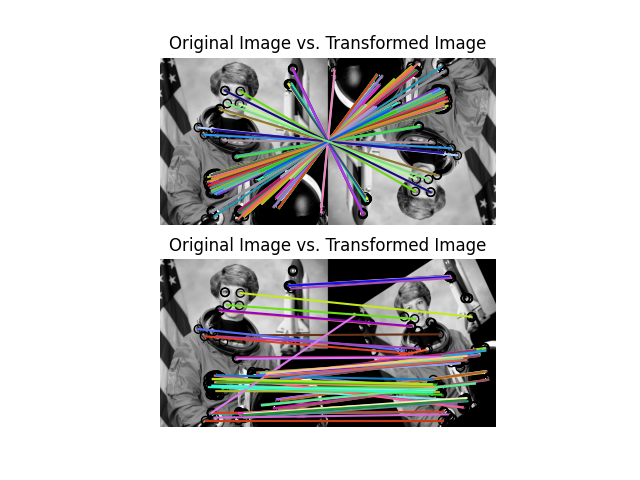
ORB特徴検出器とバイナリ記述子#
この例では、ORB特徴検出とバイナリ記述アルゴリズムを示します。方向付けられたFAST検出方法と回転BRIEF記述子を使用します。
BRIEFとは異なり、ORBは非常に効率的なハミング距離メトリックを使用してマッチングを行う一方で、比較的小規模かつ回転不変です。そのため、リアルタイムアプリケーションに適しています。
from skimage import data
from skimage import transform
from skimage.feature import match_descriptors, ORB, plot_matched_features
from skimage.color import rgb2gray
import matplotlib.pyplot as plt
img1 = rgb2gray(data.astronaut())
img2 = transform.rotate(img1, 180)
tform = transform.AffineTransform(scale=(1.3, 1.1), rotation=0.5, translation=(0, -200))
img3 = transform.warp(img1, tform)
descriptor_extractor = ORB(n_keypoints=200)
descriptor_extractor.detect_and_extract(img1)
keypoints1 = descriptor_extractor.keypoints
descriptors1 = descriptor_extractor.descriptors
descriptor_extractor.detect_and_extract(img2)
keypoints2 = descriptor_extractor.keypoints
descriptors2 = descriptor_extractor.descriptors
descriptor_extractor.detect_and_extract(img3)
keypoints3 = descriptor_extractor.keypoints
descriptors3 = descriptor_extractor.descriptors
matches12 = match_descriptors(descriptors1, descriptors2, cross_check=True)
matches13 = match_descriptors(descriptors1, descriptors3, cross_check=True)
fig, ax = plt.subplots(nrows=2, ncols=1)
plt.gray()
plot_matched_features(
img1,
img2,
keypoints0=keypoints1,
keypoints1=keypoints2,
matches=matches12,
ax=ax[0],
)
ax[0].axis('off')
ax[0].set_title("Original Image vs. Transformed Image")
plot_matched_features(
img1,
img3,
keypoints0=keypoints1,
keypoints1=keypoints3,
matches=matches13,
ax=ax[1],
)
ax[1].axis('off')
ax[1].set_title("Original Image vs. Transformed Image")
plt.show()
スクリプトの総実行時間:(0分1.657秒)